游戏人生
首页
(current)
GameDevTools
登陆
|
注册
个人中心
注销
游戏引擎 浅入浅出
Introduction
Introduction
前言
前言
1. 游戏引擎框架介绍
1. 游戏引擎框架介绍
1.1 Unity的组成
1.2 游戏引擎组成
2. Opengl开发环境搭建
2. Opengl开发环境搭建
2.1 Opengl到底是什么
2.2 搭建Opengl开发环境
2.3 使用VisualStudio开发
3. 绘制多边形
3. 绘制多边形
3.1 画个三角形
3.2 画个正方形
3.3 画个立方体
4. 着色器
4. 着色器
4.1 Unity Shader和OpenGL Shader
4.2 顶点着色器
4.3 片段着色器
5. 绘制贴图
5. 绘制贴图
5.1 颜色和贴图
5.2 贴图文件介绍
5.3 CPU与GPU的通信方式
5.4 使用stb_image解析图片
5.5 绘制带贴图的立方体盒子
5.6 压缩纹理
5.7 图片压缩工具
5.8 使用压缩纹理
5.9 DXT压缩纹理扩展
6. 索引与缓冲区对象
6. 索引与缓冲区对象
6.1 顶点索引
6.2 缓冲区对象
6.3 OpenGL Core Profile
6.4 顶点数组对象
7. 绘制Mesh和材质
7. 绘制Mesh和材质
7.1 导出Mesh文件
7.2 使用Mesh文件
7.3 Shader文件创建与使用
7.4 创建材质
7.5 使用材质
7.6 MeshRenderer
8. 绘制静态模型
8. 绘制静态模型
8.1 Blender安装与配置
8.2 Blender制作模型
8.3 Blender Python设置开发环境
8.4 Blender Python创建物体
8.5 Blender Python导出顶点数据
8.6 加载导出的Mesh
9. 基于组件开发
9. 基于组件开发
9.1 基于RTTR实现反射
9.2 实现GameObject-Component
10. 相机
10. 相机
10.1 最简单的相机
10.2 多相机渲染
10.3 相机排序
10.4 CullingMask
11. 控制系统
11. 控制系统
11.1 键盘控制
11.2 鼠标控制
12. 拆分引擎和项目
12. 拆分引擎和项目
13. 绘制文字
13. 绘制文字
13.1 TrueType简介
13.2 绘制单个字符
13.3 绘制多个文字
13.4 彩色字
14. GUI
14. GUI
14.1 正交相机
14.2 UIImage
14.3 UIMask
14.4 UIText
14.5 UIButton
15. 播放音效
15. 播放音效
15.1 播放2D音效
15.2 播放3D音效
15.3 使用FMOD Studio音频引擎
16. Profiler
16. Profiler
16.1 初识easy_profiler
16.2 集成easy_profiler
17. 嵌入Lua
17. 嵌入Lua
17.1 Sol2与C++交互
17.2 更加友好的Lua框架设计
17.3 引擎集成sol2
17.4 调试Lua
18. 骨骼动画
18. 骨骼动画
18.1 Blender制作骨骼动画
18.2 Blender导出骨骼动画
18.3 解析骨骼动画
18.4 矩阵的主序
19. 骨骼蒙皮动画
19. 骨骼蒙皮动画
19.1 骨骼蒙皮动画实现
19.2 骨骼权重
19.3 Blender蒙皮刷权重
19.4 Blender导出蒙皮权重
19.5 加载权重文件
20. 解析FBX文件
20. 解析FBX文件
20.1 导出Mesh
20.2 导出骨骼动画
20.3 导出权重
20.4 渲染骨骼蒙皮动画
21. 多线程渲染
21. 多线程渲染
21.1 GLFW多线程渲染
21.2 基于任务队列的多线程渲染
21.3 完全异步的多线程模型
21.4 引擎支持多线程渲染
22. Physx物理引擎
22. Physx物理引擎
22.1 Physx实例-小球掉落
22.2 物理材质
22.3 碰撞检测
22.4 连续碰撞检测
22.5 场景查询
22.6 引擎集成Physx
23. 经典光照
23. 经典光照
23.1 环境光
23.2 漫反射光照模型
23.3 镜面高光光照模型
23.4 高光贴图
23.5 Shader结构体
23.6 Uniform Buffer Object
23.7 方向光
23.8 点光源
23.9 多光源
24. 引擎编辑器的实现
24. 引擎编辑器的实现
24.1 分析Godot引擎编辑器
24.2 FBO RenderTexture GameTurbo DLSS
24.3 ImGui介绍与使用
24.4 分离引擎核心层和应用层
24.5 使用ImGui实现引擎编辑器
24.6 Hierarchy与Inspector面板
24.7 Geometry Buffer
25. Shadow Mapping
25. Shadow Mapping
25.1 深度图
25.2 简单阴影
88. VSCode扩展开发与定制
88. VSCode扩展开发与定制
88.1 第一个VSCode扩展程序
88.2 从源码编译VSCode
88.3 打包VSCode内置扩展
88.4 打包LuaHelper到Code-OSS
89. Doxygen生成API文档
89. Doxygen生成API文档
90. GPU分析工具
90. GPU分析工具
90.1 RenderDoc分析不显示bug
98. SubstancePainter插件开发
98. SubstancePainter插件开发
98.1 SP插件开发环境
98.2 开发SP功能性插件
98.3 开发SP渲染插件
99. Toolbag插件开发
99. Toolbag插件开发
99.1 插件开发环境
99.2 API介绍
99.3 命令行调用Toolbag
99.4 更多实现
99.5 代码参考
附录1. Wwise音频引擎
附录1. Wwise音频引擎
1.1 Wwise名词概念
1.2 Wwise制作音效导出SoundBank
1.3 集成Wwise
1.4 封装Wwise播放3D音效
1.5 Wwise性能分析器介绍
1.6 猎人开发后记
代码资源下载
点我下载
Github
点赞、收藏、关注
目录
<< 22.2 物理材质
22.4 连续碰撞检测 >>
## 22.3 碰撞检测 ```text 「游戏引擎 浅入浅出」是一本开源电子书,PDF/随书代码/资源下载: https://github.com/ThisisGame/cpp-game-engine-book ``` ```bash CLion项目文件位于 samples\physx\physx_collision_detection ``` 在Physx的设定,刚体(PxRigidBody)只是一个质点,它拥有质量,但是具体的表现是通过形状(PxShape)来约束的。 同一个刚体,可以附加一个正方体的Shape,也可以附加一个球体的Shape,不同形状的Shape有着不同的物理检测的结果。 对同一个形状的Shape,可以设置不同的标志(PxShapeFlag),`PxShapeFlag::eSIMULATION_SHAPE`表示刚体将在物理模拟中参与碰撞,`PxShapeFlag::eTRIGGER_SHAPE`则表示只作为Trigger,不参与碰撞。 其实在上一节的两个实例,就已经是参与碰撞的。 这是因为创建Shape默认是指定了`PxShapeFlag::eSIMULATION_SHAPE`,即参与碰撞。 ```c++ //file:physx/include/PxPhysics.h line:377 //@} /** @name Shapes */ //@{ /** \brief Creates a shape which may be attached to multiple actors The shape will be created with a reference count of 1. \param [in] geometry The geometry for the shape \param [in] material The material for the shape \param [in] isExclusive Whether this shape is exclusive to a single actor or maybe be shared \param [in] shapeFlags The PxShapeFlags to be set Shared shapes are not mutable when they are attached to an actor @see PxShape */ PX_FORCE_INLINE PxShape* createShape( const PxGeometry& geometry, const PxMaterial& material, bool isExclusive = false, PxShapeFlags shapeFlags = PxShapeFlag::eVISUALIZATION | PxShapeFlag::eSCENE_QUERY_SHAPE | PxShapeFlag::eSIMULATION_SHAPE) { PxMaterial* materialPtr = const_cast<PxMaterial*>(&material); return createShape(geometry, &materialPtr, 1, isExclusive, shapeFlags); } ``` 但是之前并没有添加回调,下面就来将回调加上。 本小节通过小球撞墙的例子,来看着两个标志的表现,以及测试事件回调。 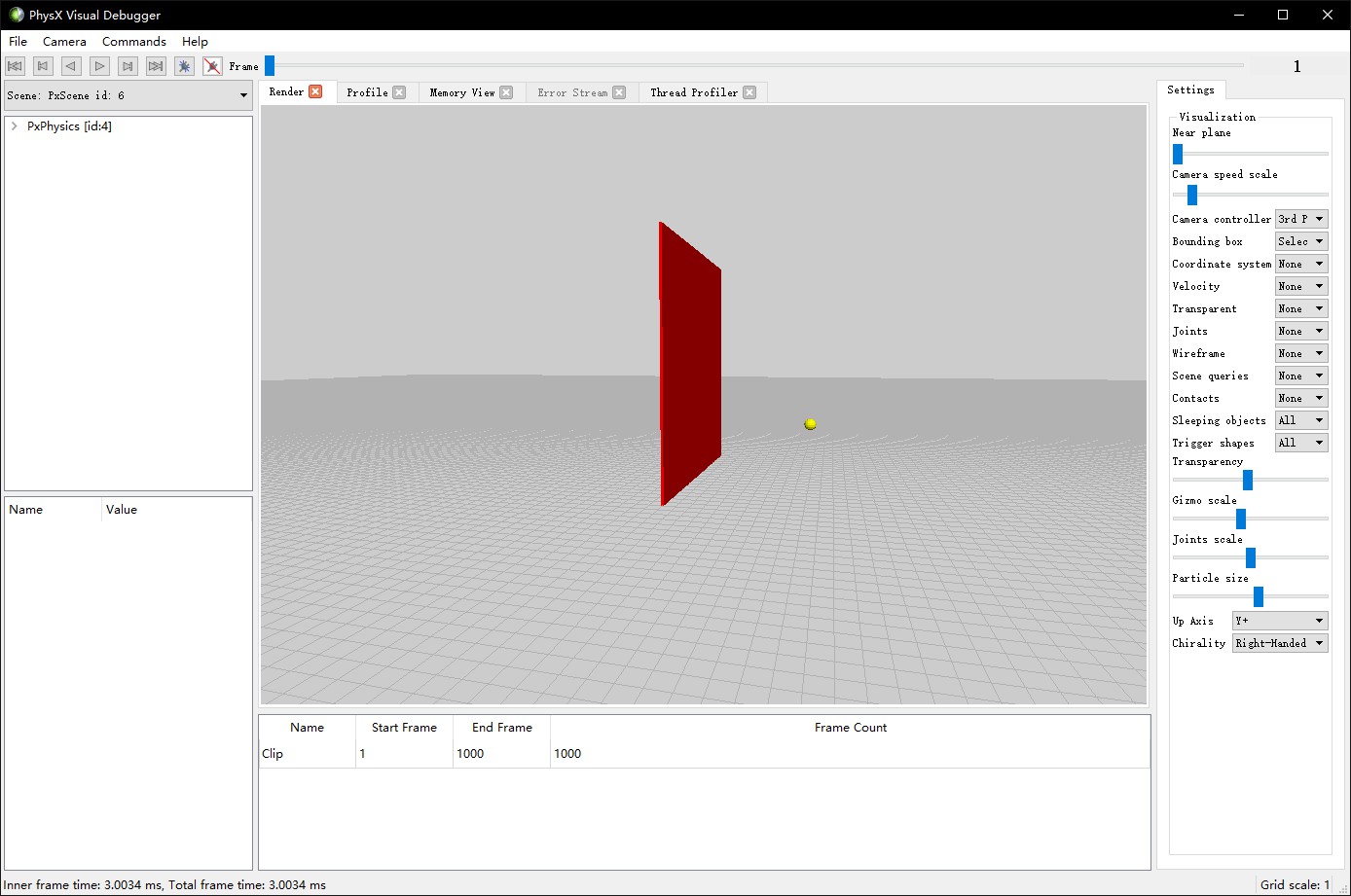 ### 1. 事件回调 Physx提供了事件回调接口`PxSimulationEventCallback`。 例子里继承并重写了接口,输出Log,用于观察碰撞检测。 ```c++ //file:example/simulation_event_callback.h line:14 //~en SimulationEventCallback is a PxSimulationEventCallback that is used to receive events from the PhysX SDK. //~zh SimulationEventCallback 是一个用于从 PhysX SDK 接收事件的 PxSimulationEventCallback。 class SimulationEventCallback: public PxSimulationEventCallback { public: void onConstraintBreak(PxConstraintInfo* constraints, PxU32 count) override { printf("onConstraintBreak\n"); } void onWake(PxActor** actors, PxU32 count) override { printf("onWake\n"); } void onSleep(PxActor** actors, PxU32 count) override { printf("onSleep\n"); } void onTrigger(PxTriggerPair* pairs, PxU32 count) override { printf("onTrigger: %d trigger pairs\n", count); while(count--) { const PxTriggerPair& current = *pairs++; if(current.status & PxPairFlag::eNOTIFY_TOUCH_FOUND) printf("Shape is entering trigger volume\n"); if(current.status & PxPairFlag::eNOTIFY_TOUCH_LOST) printf("Shape is leaving trigger volume\n"); } } void onAdvance(const PxRigidBody*const*, const PxTransform*, const PxU32) override { printf("onAdvance\n"); } void onContact(const PxContactPairHeader& pairHeader, const PxContactPair* pairs, PxU32 count) override { printf("onContact: %d pairs\n", count); } }; ``` 在创建Scene的时候,对SceneDesc指定了事件回调处理`SimulationEventCallback`的实例`gSimulationEventCallback`。 ```c++ //file:example/main.cpp line:38 //~zh 设置在碰撞发生时,Physx需要做的事情 //~en Set the actions when collision occurs,Physx needs to do. static PxFilterFlags SimulationFilterShader(PxFilterObjectAttributes attributes0, PxFilterData filterData0,PxFilterObjectAttributes attributes1, PxFilterData filterData1,PxPairFlags& pairFlags, const void* constantBlock, PxU32 constantBlockSize) { pairFlags = PxPairFlag::eCONTACT_DEFAULT | PxPairFlag::eNOTIFY_TOUCH_FOUND; return PxFilterFlags(); } //~en Create Scene //~zh 创建Scene void CreateScene(){ PxSceneDesc sceneDesc(gPhysics->getTolerancesScale()); sceneDesc.gravity = PxVec3(0.0f, -0.98f, 0.0f); gDispatcher = PxDefaultCpuDispatcherCreate(2); sceneDesc.cpuDispatcher = gDispatcher; //~zh 指定事件回调 //~en Specify the event callback sceneDesc.simulationEventCallback = &gSimulationEventCallback; //~zh 设置在碰撞发生时,Physx需要做的事情 //~en Set the actions when collision occurs,Physx needs to do. sceneDesc.filterShader = SimulationFilterShader; gScene = gPhysics->createScene(sceneDesc); PxPvdSceneClient* pvdClient = gScene->getScenePvdClient(); if(pvdClient) { pvdClient->setScenePvdFlag(PxPvdSceneFlag::eTRANSMIT_CONSTRAINTS, true); pvdClient->setScenePvdFlag(PxPvdSceneFlag::eTRANSMIT_CONTACTS, true); pvdClient->setScenePvdFlag(PxPvdSceneFlag::eTRANSMIT_SCENEQUERIES, true); } } ``` 由于物理引擎是特别消耗性能的,所以Physx默认是不处理碰撞检测回调的,所以还需要将碰撞检测回调的处理标志加上: ```c++ //~zh 设置在碰撞发生时,Physx需要做的事情 //~en Set the actions when collision occurs,Physx needs to do. sceneDesc.filterShader = SimulationFilterShader; ``` 在函数`SimulationFilterShader`里,指定了`PxPairFlag::eNOTIFY_TOUCH_FOUND`,这个标志表示在碰撞发生时,Physx需要处理回调函数。 至此,事件回调就设置好了。<a id="antiCollectorAdTxt" href="https://github.com/ThisisGame/cpp-game-engine-book">「游戏引擎 浅入浅出」是一本开源电子书,PDF/随书代码/资源下载: https://github.com/ThisisGame/cpp-game-engine-book</a> ### 2. 检测碰撞 创建墙壁与小球。 ```c++ //file:example/main.cpp line:71 //~en Create wall,add to scene. //~zh 创建墙,并添加到场景中 void CreateWall(){ //~en Create RigidBody,pos is (0,10,0) //~zh 创建刚体,坐标是 (0,10,0) PxRigidStatic* body = gPhysics->createRigidStatic(PxTransform(PxVec3(0, 10, 0))); //~en Create Physx Material. //~zh 创建物理材质 PxMaterial* wallMaterial = gPhysics->createMaterial(1.0f, 1.0f, 0.0f); //~en Create wall shape. //~zh 创建墙体形状 const PxVec3 halfExtent(0.1f, 10.0f, 10.0f); PxShape* shape = gPhysics->createShape(PxBoxGeometry(halfExtent), *wallMaterial); //~en Add shape to body. //~zh 设置刚体形状,长方体的一面墙。 body->attachShape(*shape); shape->release(); //~en Add body to scene. //~zh 将刚体添加到场景中 gScene->addActor(*body); } //~zh 创建小球,并添加到场景中 //~en Create ball,add to scene. void CreateBall(){ //~en Create RigidBody,pos is (10,0,0) //~zh 创建刚体,坐标是 (10,0,0) PxRigidDynamic* body = gPhysics->createRigidDynamic(PxTransform(PxVec3(10, 5, 0))); body->setLinearVelocity(PxVec3(-14.0f, 0.0f, 0.0f)); //~en Create Physx Material. //~zh 创建小球的物理材质 PxMaterial* ballMaterial = gPhysics->createMaterial(0.5f, 0.5f, 1.0f); //~en Set rigid body sharp //~zh 设置刚体形状,一个球。 float radius = 0.5f; PxShape* shape = gPhysics->createShape(PxSphereGeometry(radius), *ballMaterial); body->attachShape(*shape); shape->release(); //~en calculate mass,mass = volume * density //~zh 根据体积、密度计算质量 PxRigidBodyExt::updateMassAndInertia(*body, 1.0f); gScene->addActor(*body); } ``` 和上一节的代码没有太大差别,只是创建地板换成了创建墙壁,就不多介绍了。 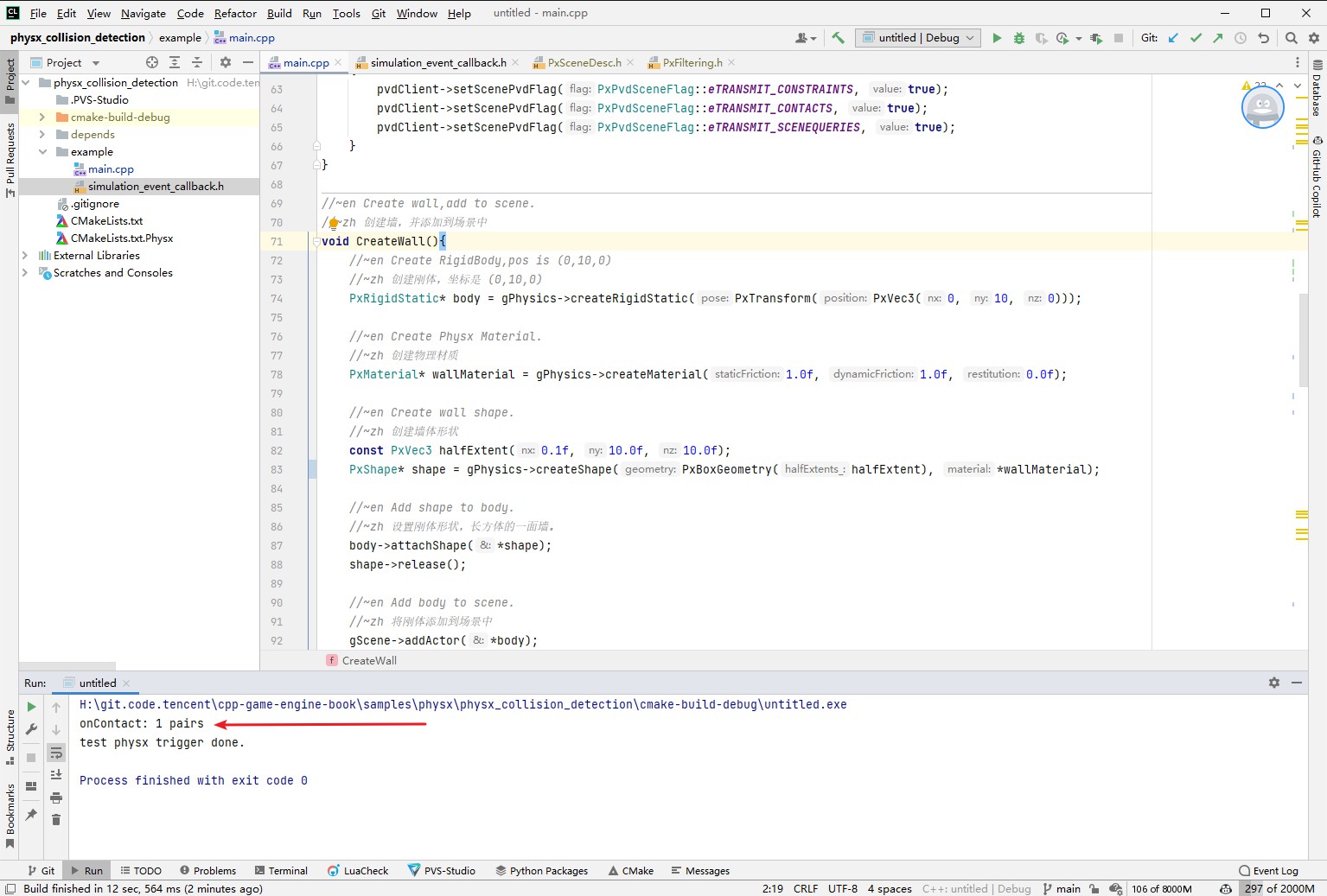 输出了碰撞的Log。  在PVD中可以看到发生了碰撞,小球被墙壁反弹。 ### 3. 作为Trigger 将墙作为Trigger,不参与碰撞。 ```c++ //file:example/main.cpp line:71 //~en Create wall,add to scene. //~zh 创建墙,并添加到场景中 void CreateWall(){ ...... //~en Create wall shape. //~zh 创建墙体形状 const PxVec3 halfExtent(0.1f, 10.0f, 10.0f); // PxShape* shape = gPhysics->createShape(PxBoxGeometry(halfExtent), *wallMaterial); PxShape* shape = gPhysics->createShape(PxBoxGeometry(halfExtent), *wallMaterial,false,PxShapeFlag::eVISUALIZATION | PxShapeFlag::eTRIGGER_SHAPE); ...... } ``` 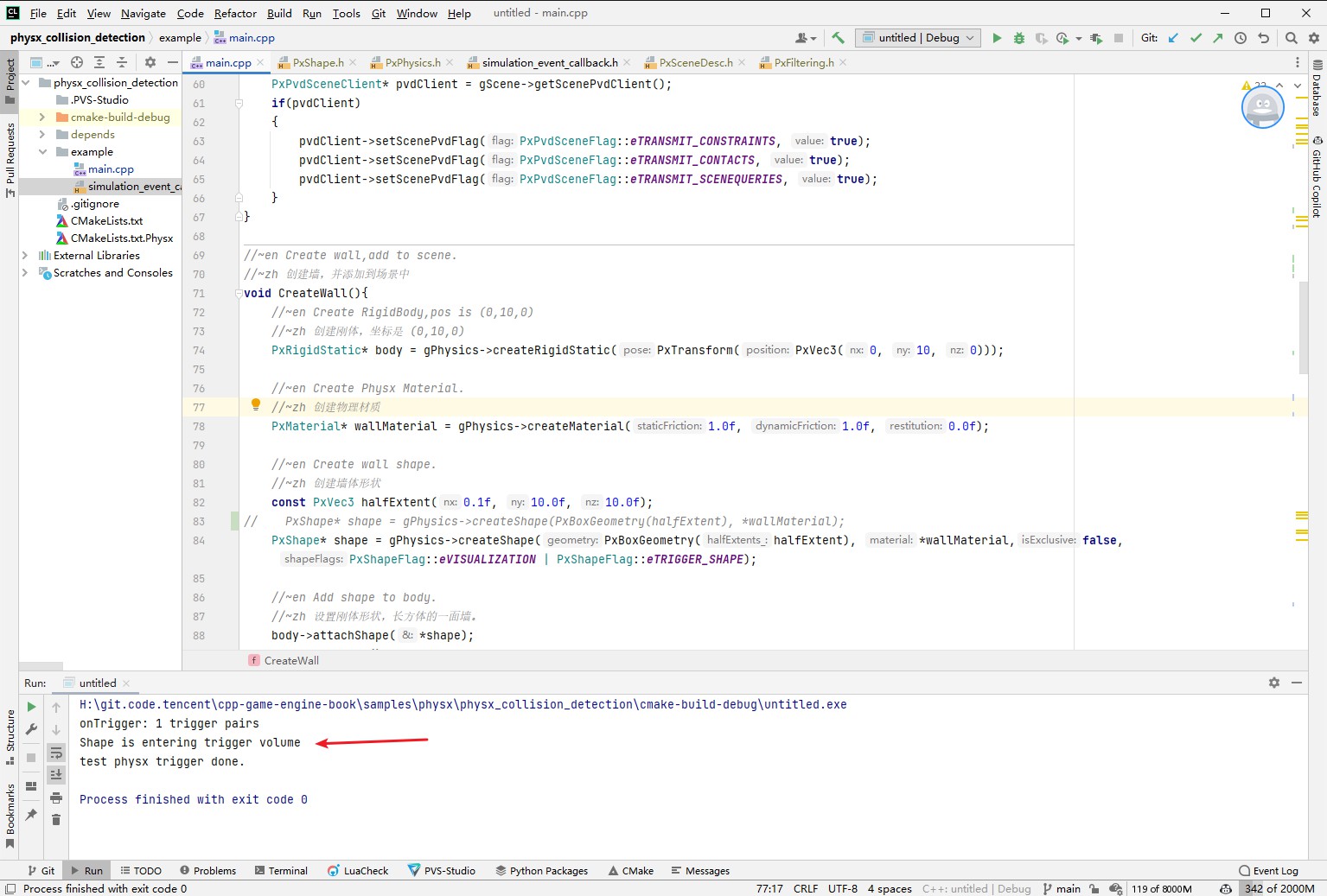 输出了Trigger的Log。  在PVD中可以看到没有碰撞,小球直接穿过了墙壁。
<< 22.2 物理材质
22.4 连续碰撞检测 >>
12
代码资源下载
点我下载
Github
点赞、收藏、关注
目录
Introduction
Introduction
前言
前言
1. 游戏引擎框架介绍
1. 游戏引擎框架介绍
1.1 Unity的组成
1.2 游戏引擎组成
2. Opengl开发环境搭建
2. Opengl开发环境搭建
2.1 Opengl到底是什么
2.2 搭建Opengl开发环境
2.3 使用VisualStudio开发
3. 绘制多边形
3. 绘制多边形
3.1 画个三角形
3.2 画个正方形
3.3 画个立方体
4. 着色器
4. 着色器
4.1 Unity Shader和OpenGL Shader
4.2 顶点着色器
4.3 片段着色器
5. 绘制贴图
5. 绘制贴图
5.1 颜色和贴图
5.2 贴图文件介绍
5.3 CPU与GPU的通信方式
5.4 使用stb_image解析图片
5.5 绘制带贴图的立方体盒子
5.6 压缩纹理
5.7 图片压缩工具
5.8 使用压缩纹理
5.9 DXT压缩纹理扩展
6. 索引与缓冲区对象
6. 索引与缓冲区对象
6.1 顶点索引
6.2 缓冲区对象
6.3 OpenGL Core Profile
6.4 顶点数组对象
7. 绘制Mesh和材质
7. 绘制Mesh和材质
7.1 导出Mesh文件
7.2 使用Mesh文件
7.3 Shader文件创建与使用
7.4 创建材质
7.5 使用材质
7.6 MeshRenderer
8. 绘制静态模型
8. 绘制静态模型
8.1 Blender安装与配置
8.2 Blender制作模型
8.3 Blender Python设置开发环境
8.4 Blender Python创建物体
8.5 Blender Python导出顶点数据
8.6 加载导出的Mesh
9. 基于组件开发
9. 基于组件开发
9.1 基于RTTR实现反射
9.2 实现GameObject-Component
10. 相机
10. 相机
10.1 最简单的相机
10.2 多相机渲染
10.3 相机排序
10.4 CullingMask
11. 控制系统
11. 控制系统
11.1 键盘控制
11.2 鼠标控制
12. 拆分引擎和项目
12. 拆分引擎和项目
13. 绘制文字
13. 绘制文字
13.1 TrueType简介
13.2 绘制单个字符
13.3 绘制多个文字
13.4 彩色字
14. GUI
14. GUI
14.1 正交相机
14.2 UIImage
14.3 UIMask
14.4 UIText
14.5 UIButton
15. 播放音效
15. 播放音效
15.1 播放2D音效
15.2 播放3D音效
15.3 使用FMOD Studio音频引擎
16. Profiler
16. Profiler
16.1 初识easy_profiler
16.2 集成easy_profiler
17. 嵌入Lua
17. 嵌入Lua
17.1 Sol2与C++交互
17.2 更加友好的Lua框架设计
17.3 引擎集成sol2
17.4 调试Lua
18. 骨骼动画
18. 骨骼动画
18.1 Blender制作骨骼动画
18.2 Blender导出骨骼动画
18.3 解析骨骼动画
18.4 矩阵的主序
19. 骨骼蒙皮动画
19. 骨骼蒙皮动画
19.1 骨骼蒙皮动画实现
19.2 骨骼权重
19.3 Blender蒙皮刷权重
19.4 Blender导出蒙皮权重
19.5 加载权重文件
20. 解析FBX文件
20. 解析FBX文件
20.1 导出Mesh
20.2 导出骨骼动画
20.3 导出权重
20.4 渲染骨骼蒙皮动画
21. 多线程渲染
21. 多线程渲染
21.1 GLFW多线程渲染
21.2 基于任务队列的多线程渲染
21.3 完全异步的多线程模型
21.4 引擎支持多线程渲染
22. Physx物理引擎
22. Physx物理引擎
22.1 Physx实例-小球掉落
22.2 物理材质
22.3 碰撞检测
22.4 连续碰撞检测
22.5 场景查询
22.6 引擎集成Physx
23. 经典光照
23. 经典光照
23.1 环境光
23.2 漫反射光照模型
23.3 镜面高光光照模型
23.4 高光贴图
23.5 Shader结构体
23.6 Uniform Buffer Object
23.7 方向光
23.8 点光源
23.9 多光源
24. 引擎编辑器的实现
24. 引擎编辑器的实现
24.1 分析Godot引擎编辑器
24.2 FBO RenderTexture GameTurbo DLSS
24.3 ImGui介绍与使用
24.4 分离引擎核心层和应用层
24.5 使用ImGui实现引擎编辑器
24.6 Hierarchy与Inspector面板
24.7 Geometry Buffer
25. Shadow Mapping
25. Shadow Mapping
25.1 深度图
25.2 简单阴影
88. VSCode扩展开发与定制
88. VSCode扩展开发与定制
88.1 第一个VSCode扩展程序
88.2 从源码编译VSCode
88.3 打包VSCode内置扩展
88.4 打包LuaHelper到Code-OSS
89. Doxygen生成API文档
89. Doxygen生成API文档
90. GPU分析工具
90. GPU分析工具
90.1 RenderDoc分析不显示bug
98. SubstancePainter插件开发
98. SubstancePainter插件开发
98.1 SP插件开发环境
98.2 开发SP功能性插件
98.3 开发SP渲染插件
99. Toolbag插件开发
99. Toolbag插件开发
99.1 插件开发环境
99.2 API介绍
99.3 命令行调用Toolbag
99.4 更多实现
99.5 代码参考
附录1. Wwise音频引擎
附录1. Wwise音频引擎
1.1 Wwise名词概念
1.2 Wwise制作音效导出SoundBank
1.3 集成Wwise
1.4 封装Wwise播放3D音效
1.5 Wwise性能分析器介绍
1.6 猎人开发后记